


本示例中的激光雷达数据来自装置在车辆上的激光雷达Velodyne HDL32E。创立velodyneFileReader目标以读取录制的PCAP文件。
激光雷达每次扫描的数据都存储为三维点云。为了可以高效地处理这一些数据需要用快速索引和查找经过K-d tree数据结构处理数据。
切割归于地平面、主车和邻近障碍物的点设置用于符号这些点的色彩映射。

激光雷达装置在车辆顶部点云或许包括归于车辆自身的点例如车顶或发动机罩上的点。了解车辆的尺度可以切割出离车辆最近的点。
创立车辆尺度目标以存储车辆尺度典型车辆尺度为4.7m×1.8m×1.4m。
在车辆坐标系中指定激光雷达的装置的当地。在该示例中车辆坐标系原点坐落后轴中心正X方向指向前方正Y方向指向左边正Z方向指向上方激光雷达装置在车辆的顶部中心与地上平行。
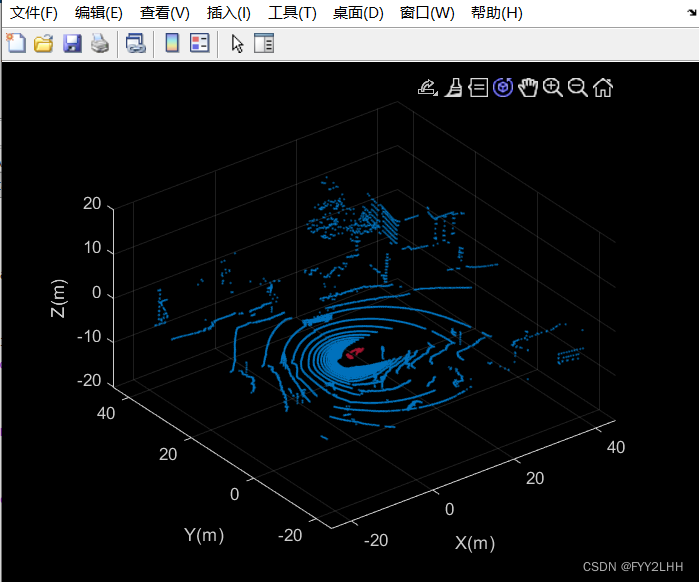
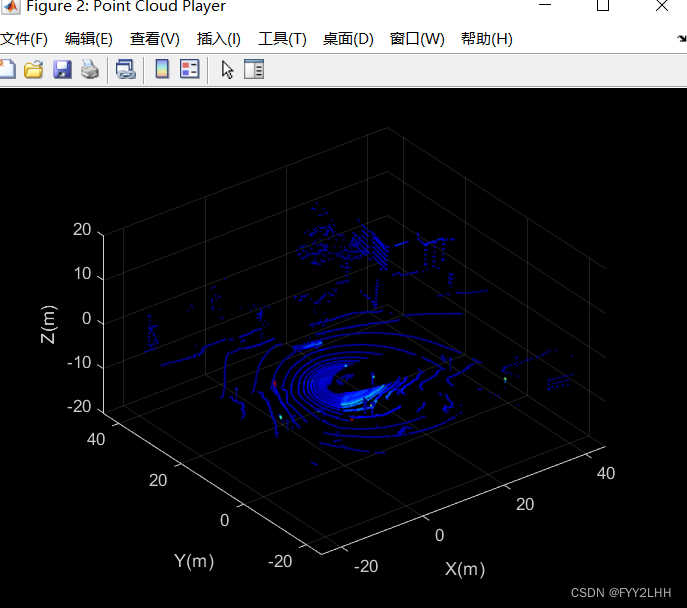
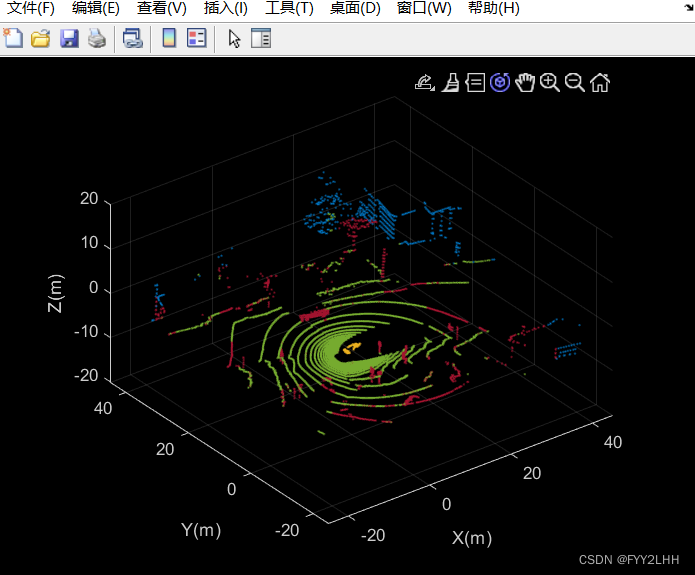
为了从激光雷达数据中辨认障碍物首要运用segmentGroundFromLidarData函数对地上进行分段从有安排的激光雷达数据中切割出归于地平面的点。
运用点云上的挑选功用删去归于主车和地平面的点将“Outputsize”指定为“full”以保留点云的安排性质。
经过寻觅间隔主车必定半径内一切不归于地平面和主车的点来切割邻近的障碍物。这个半径可以精确的经过激光雷达的规模和感兴趣的区域来确认。
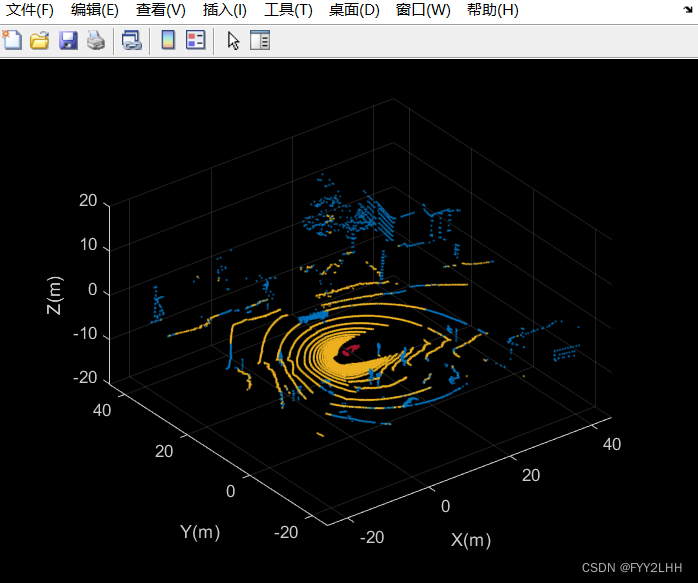
点击“Run”按钮可以正常的看到激光雷达点云30s点云的改变如下图所示



 浙公网安备 浙ICP备19047662号-1
浙公网安备 浙ICP备19047662号-1