


无人驾驶车辆如何利用时空信息更好识别运动中的物体,又如何在没有定位导航条件下知道“我在哪”?这是当前无人驾驶正在攻克的技术难题。现在,中国的无人驾驶AI公司毫末智行提出了更好的解决方案。
此次毫末智行团队提交的两篇最新论文研究成果分别是:《EfficientSpatial-Temporal Information Fusion for LiDAR-Based 3D Moving ObjectSegmentation》(《基于激光雷达的三维运动目标分割的高效时空信息融合》)、《OverlapTransformer:An Efficient and Yaw-Angle-Invariant Transformer Network for LiDAR-Based PlaceRecognition》(《OverlapTransformer:一种基于激光雷达的高效、旋转无关的位置识别网络》)。两篇论文从2000多篇投稿论文中脱颖而出,成功入选。论文结合激光雷达在无人驾驶车辆上的应用,分别提出了一种新的针对激光雷达运动目标分割的深度神经网络和一种新的基于激光雷达的位置识别算法,帮助无人驾驶车辆有效利用时空信息、识别运动目标,以及为自身进行快速准确的定位,从而极大的提升激光雷达的感知能力。
随着近年来无人驾驶领域对激光雷达应用的逐步深入探索,其强大的空间三维分辨能力已普遍被视为无人驾驶技术向高阶升级和商用落地过程中的重要能力。然而,硬件采集的信息数据,也需要算法进行更快、更准确的解析,才能帮助自动驾驶车辆更好地对其加以利用,以此来实现更安全的行驶。毫末智行的两篇论文即从这一角度进行切入。
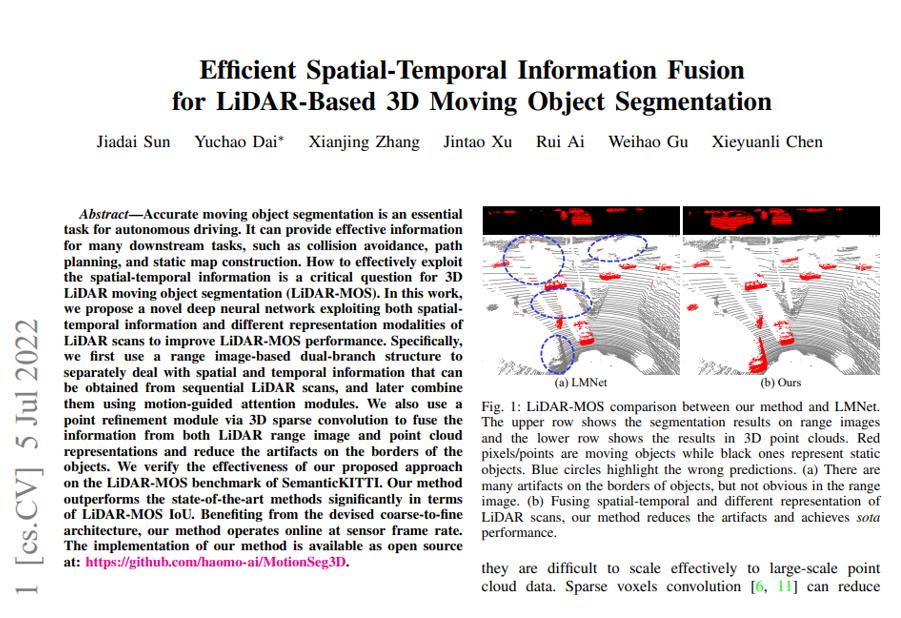
在《Efficient Spatial-Temporal Information Fusion for LiDAR-Based 3DMoving Object Segmentation》中指出,准确的运动目标分割是无人驾驶的一项重要任务,而如何有效地利用时空信息是三维激光雷达运动目标分割的核心问题。为此,毫末提出了一种新的深度神经网络,利用时空信息和激光雷达的不同表示模式来提高激光雷达MOS性能。具体来说,毫末提出了一种新颖有效的基于激光雷达的在线运动目标分割网络,利用双分支结构以更好的融合空间信息和时间信息,并引入了一种“由粗到细”的策略来减少物体边界上的边界模糊问题,在保持实时性的同时,性能一举超越之前的网络。目前,相关方法在SemanticKITTI MOS基准上实现了最先进的激光雷达MOS性能。
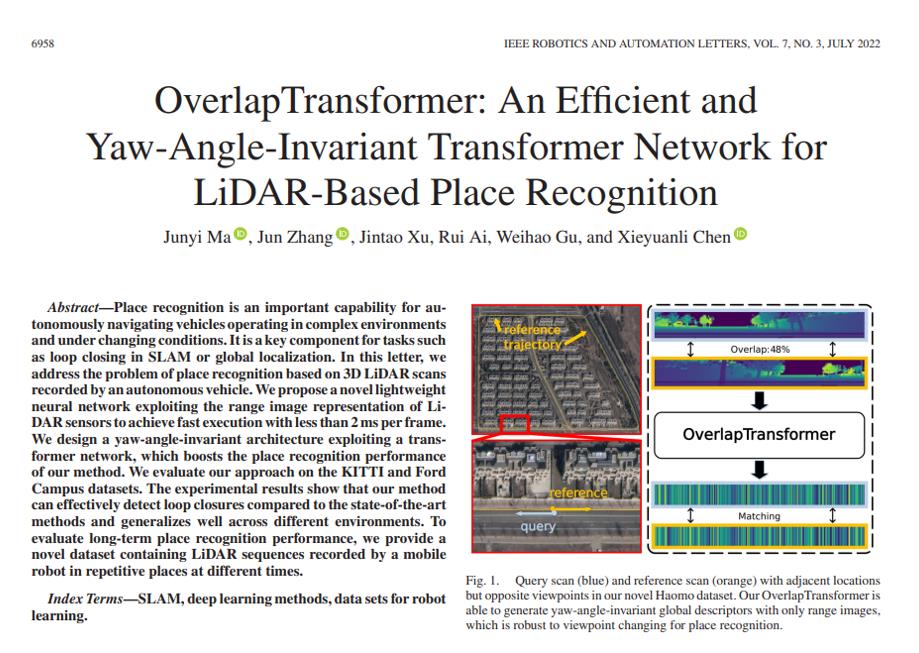
在《Overlap Transformer: An Efficient and Yaw-Angle-InvariantTransformer Network for LiDAR-Based Place Recognition》一文中,毫末提出了一种新的位置识别方法,利用安装在无人驾驶车辆上的三维激光雷达产生的距离图像,可实现仅使用激光雷达数据而不用任何别的信息来检测SLAM的loop closure候选或是直接给出地点识别,并在不进行微调的情况下很好地推广到不同的环境中,在长时间跨度的室外大规模环境(毫末数据集)中实现长期位置识别。OverlapTransformer的工作速度比大多数最先进的方法更快,各项指标也都达到了SOTA。
作为中国量产无人驾驶第一名,毫末智行在过去的两年半时间里,凭借强大的技术创造新兴事物的能力和产品的快速落地能力,收获了业内外的广泛认可。毫末打造的中国无人驾驶领域首个数据智能体系MANA,通过定义和使用数据智能,提升无人驾驶产品能力,是毫末产品迭代的基石,具备高效率、低成本挖掘数据价值的能力。截止2022年6月,毫末数据智能体系MANA学习时长已超24万小时,虚拟驾龄相当于人类司机驾驶2万年。基于MANA的强大能力,以及规模化量产能力与日趋成熟的商业模式,毫末已经建立起了完善的数据闭环,为自身技术产品的一直在升级以及为中国无人驾驶技术的进步提供了强有力支撑。

官方公众号

手机官网
 浙公网安备 浙ICP备19047662号-1
网站地图
浙公网安备 浙ICP备19047662号-1
网站地图


