


导航的首选方案,本文将对激光雷达核心组件进行介绍并重点阐述基于激光三角测距法的激光雷达原理。
激光器:激光器是激光雷达中的激光发射机构。在工作过程中,它会以脉冲的方式点亮。
接收器:激光器发射的激光照射到障碍物以后,通过障碍物的反射,反射光线会经由镜头组汇聚到接收器上。
信号处理单元:信号处理单元负责控制激光器的发射,以及接收器收到的信号的处理。依据这一些信息计算出目标物体的距离信息。
旋转机构:以上3个组件构成了测量的核心部件。旋转机构负责将上述核心部件以稳定的转速旋转起来,以此来实现对所在平面的扫描,并产生实时的平面图信息。
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达的硬件要求高,但测量精度比激光三角法要高得多,故多用于军事领域。而激光三角测距法因其成本低,精度满足大部分商用及民用要求,故得到了广泛关注。
激光三角测距法主要是通过一束激光以一定的入射角度照射被测目标,激光在目标表面发生反射和散射,在另一角度利用透镜对反射激光汇聚成像,光斑成像在CCD(Charge-coupled Device,感光耦合组件)位置传感器上。当被测物体沿激光方向发生移动时,位置传感器上的光斑将产生移动,其位移大小对应被测物体的移动距离,因此可通过算法设计,由光斑位移距离计算出被测物体与基线的距离值。由于入射光和反射光构成一个三角形,对光斑位移的计算运用了几何三角定理,故该测量法被称为激光三角测距法。
按入射光束与被测物体表面法线的角度关系,激光三角测距法可分为斜射式和直射式两种。
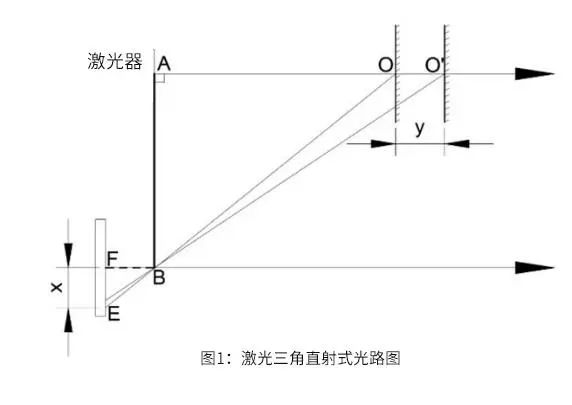
如图1所示,当激光光束垂直入射被测物体表面,即入射光线与被测物体表面法线共线时,为直射式激光三角法。
当光路系统中,激光入射光束与被测物体表面法线°时,该入射方式即为斜射式。如图2所示的光路图为激光三角法斜射式光路图。
由激光器发射的激光与物体表面法线成一定角度入射到被测物体表面,反(散)射光经B处的透镜汇聚成像,最后被光敏单元采集。
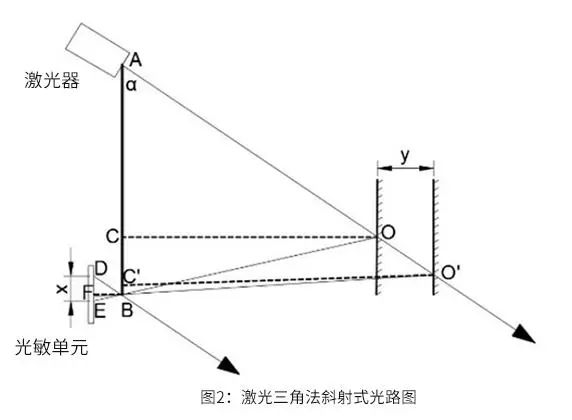
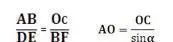
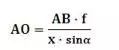
由图2可知入射光AO与基线AB的夹角为α,AB为激光器中心与CCD中心的距离,BF为透镜的焦距f,D为被测物体距离基线无穷远处时反射光线在光敏单元上成像的极限位置。DE为光斑在光敏单元上偏离极限位置的位移,记为x。当系统的光路确定后,α、AB与f均为已知参数。由光路图中的几何关系可知△ABO∽△DEB,则有边长关系:
在确定系统的光路时,可将CCD位置传感器的一个轴与基线AB平行(假设为y轴),则由通过算法得到的激光光点像素坐标为(Px,Py)可得到x的值为:

其中CellSize是光敏单元上单个像素的尺寸,DeviationValue是通过像素点计算的投影距离和实际投影距离x的偏差量。当被测物体与基线AB产生相对位移时,x改变为x,由以上条件可得被测物体运动距离y为:
无论是直射式还是斜射式激光三角测距法,均可实现对被测物体的高精度、非接触测量,但直射式分辨率没有斜射式高。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

的发射方式、数据采集、成像分辨率和应用场景等方面存在着很大的区别。 首先,单线
在无人驾驶应用中主要用来探测道路上的障碍物信息,把数据和信号传递给自动驾驶的大脑,再做出相应的驾驶动作,但室外常见的干扰因素如雨、雾、雪、粉尘、高低温等对
(LiDAR)量产进入新周期,「拼性能、拼可靠、拼成本」成为所有行业玩家必须面临的
形本地可以测得透镜中心和照射到CMOS/CCD上的距离,就能够获得物距,本地的分辨率
系统(Light Detection and Ranging,LiDAR),是以发射
采用机械旋转部件作为光束扫描的实现方式,能轻松实现大角度扫描,但是装配困难、扫描频率低。
接收机各种噪声大小与概率分布、计算空间背景光大小和光谱特性的前提下,基于信号检测理论中的虚警概率和发现概率提出了一种能
LiDAR(Light Detection and Ranging)是
系统的简称,另外也称 LADAR(Laser Detection and Ranging)。
功能与摄像头角分辨率相结合,用来提供准确的深度感知传感,从而完成图像(图1)。
SOSLAB与纵慧芯光(Vertilite)并肩作战,开发出ML(Mobility LiDAR)系列
波等),使光波在投射到物体后返回探测器的过程中在光强波形上形成一个相位差,那么经过测量相位差,就可以间接获取光的飞行时间,从而反推飞行距离。
的目标物体距离越远,在CCD上的位置差别就越小,以致于在超过某个距离后,CCD几乎没办法分辨,而TOF
这把尺子,依据各种参数设定和距离分辨率;以及测量策略的不同,来测定距离。
,最大范围是 5-8m,并不适用于较大的空间,且这种方法受光线的影响很大。相比之下,
已被大范围的应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,
的回波检测,再使用一个很高精度的计时器去测量光波发射到目标物引起反馈再回来的时间差,而光速具有不变性,再将时间差乘以光速便可得到目标物体的距离。
集成,以飞行平台为载体,通过对地面进行扫描,记录目标的姿态、位置和反射强度等信息,获取地表的
维信息,并深入加工得到所需空间信息的技术。在军民用领域都有广泛的潜力和前景。机载
MEMS微镜已经存在多年,甚至在视频投影机这样的日常设备中得到了应用。当今MEMS微镜的问题就在于很难将其用于远距离
的关键性能指标。典型的MEMS微镜的镜面尺寸小,偏转角度较小,因此无法达到理想的探
光波来完成上述任务。能够使用非相干的能量接收方式,这主要是一脉冲计数为基础的
最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和
」。 其实更准确的一个定义是 LADAR:LAser Detection
测厚的原理,对板材在线测厚系统来进行了硬件设计和软件设计并给出了系统测量指标。

官方公众号

手机官网
 浙公网安备 浙ICP备19047662号-1
网站地图
浙公网安备 浙ICP备19047662号-1
网站地图


